
- Информация
- Инструкция по работе с геодезическими квадрокоптерами
- Как выявить откалиброван квадрокоптер или нет
- Как откалибровать квадрокоптер Syma X5C
- Триммирование квадрокоптера
- Какие кнопки есть на пульте управления Syma X5C
- Что делать, если дрон улетел и не вернулся?
- Как снимать видео с дрона?
- Виды калибровок
- Грабли
- Если хотите снимать пейзажи и панорамы
- Какое приложение для управления выбрать?
- Калибровка простых моделей квадрокоптеров
- Квадрокоптер с gps своими руками. подробная инструкция по сборке. часть 1 — сборка.
- Комплектация
- Матчасть
- Настройка квадрокоптера с gps (inav).
- О продукте
- Первая авария
- Подключение fpv системы квадрокоптера.
Информация
15 сентября 2022
Инструкция по работе с геодезическими квадрокоптерами
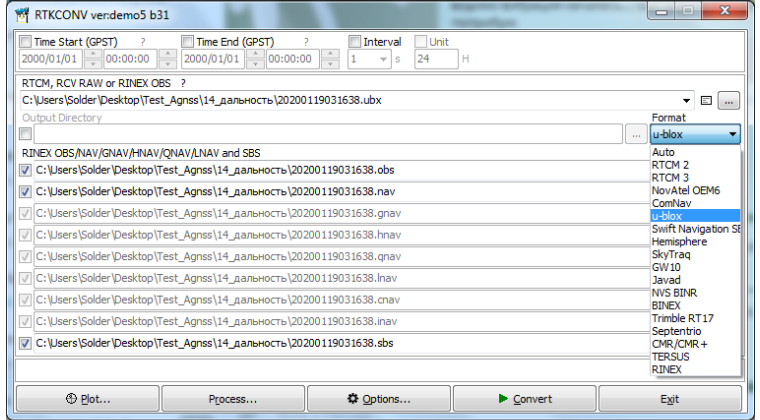
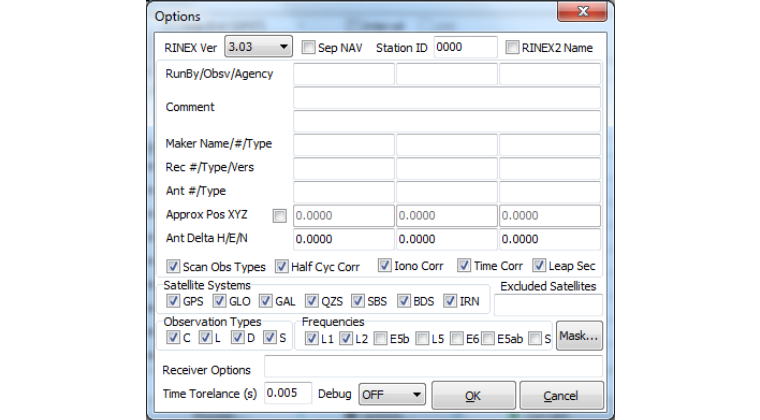
Перед началом аэрофотосъемки (АФС) необходимо:- Зарегистрировать ваш квадрокоптер в Росавиации;- Проверить отсутствие запретных для полета зон в месте проведения работ. Карта запретных зон для квадрокоптеров DJI;- При необходимости получите разрешения на полет квадрокоптера у местных органов власти;- Оценить приемлемость погодных условий для полетов (отсутствие осадков, тумана, сильного ветра (более 10 м/с), высоту нижнего края облачности и пр. );Подготовка оборудования- Проверьте разъем питания аккумулятора на предмет оплавления и загрязнение. Включите квадрокоптер и убедитесь в отсутствии предупреждений и ошибок в приложении DJI GO 4. — Используйте карту памяти U3 класса, с объемом от 16 до 64 Гб. Карты 128 Гб могут вызвать зависание камеры на 10-40 секунд во время интервальной съемки. — Зарядите аккумуляторы. Одна батарея в среднем обеспечивает 27 минут полетного времени или 70-90Га охватываемой площади. — Зарядите пульт управления. — Зарядите аккумулятор базовой станции и убедитесь в достаточности объема свободной памяти. Настройте режим записи измерений статики в точке с известными координатами. Подготовка к АФСДля получения качественного фотоматериала, помимо правильных настроек камеры, необходимо уменьшить проявление различных артефактов, таких как: тени, блики, пересвеченные и перетемненные области. Для этого:- Производите АФС в светлое время суток. Идеально, если солнечный свет будет рассеян тонкой, высокой, сплошной облачностью. В ясный день, лучшее время для съемки: пару часов после рассвета и перед закатом. — Блики можно устранить поляризационными фильтрами. — Для подбора оптимальной экспозиции, ориентируйтесь на изображение транслируемое с камеры и используйте гистограмму. — Полезно сделать тестовый вылет в несколько различных точек области проведения работ, сделать тестовые фото с разной экспозицией, оценить обстановку, убедиться в отсутствии помех, проверить уровень сигналов от спутников, связь, силу ветра и т. Планирование маршрута полетаДля построения конечного продукта — цифровой модели местности, рельефа, карты высот, ортофотоплана и т. , фотограмметрической программе необходимо большое количество качественных фотографий местности. Фото должны иметь достаточное продольное и поперечное перекрытие, для поиска общих точек между всеми соседними фотографиями. Для обеспечения этого необходимо, чтобы квадрокоптер находился на определенной высоте и летел по определенному маршруту делая фотографии с разной периодичностью. Существуют специальные приложения которые управляют квадрокоптером и делают все в автоматическом режиме в соответствии с настройками пользователя. Вот некоторые из них: Litchi + проф. планировщик teofly. com, Pix4D Capture, MapPilot, DroneDeploy, DJI GS Pro и другие. Существуют также решения с построением маршрута в сторонних программах с последующей загрузкой в полетное приложение с помощью KML файла. Например платные Litchi или MapPilot. Данный метод подходит для продвинутых пользователей и позволяет контролировать множество параметров прохождения маршрутов а также получать бОльшую производительность. При правильном построении маршрутов, квадрокоптер летает по оптимальной траектории и не останавливается в поворотных точках что существенно сокращает время полета. При средней скорости горизонтального перемещения 10 м/с, максимальное расстояние которое может пройти коптер за один полет — 11 км. Интервальное фотографирование при этом методе можно производить не зависимо от приложения, с помощью модуля синхронизации камеры Ashot. Активация модуля управления камерой AshotМодуль позволяет производить фотографирование без участия приложения с частотой 1 кадр каждые 1. 3 или 1. 8 секунды, а также передает сигнал о фото событии в GNSS приемник, точно в середине выдержки. Для активации Ashot необходимо выполнить следующие действия:1. Настройте на кнопки С1 или С2 пульта управления, функцию опускания камеры вниз (в надир, -90) и поднимания вверх (в горизонт, 0). Функции Camera Forward/Down в приложении DJI GO4, Restart Gimbal (Рестарт подвеса) в Litchi. Опустите камеру вниз. Из нижнего положения поднимите кнопкой камеру вверх и сразу опустите вниз. Камера начнет делать фотографии с интервалом 1. 3 секунды. Для активации интервала 1. 8 секунды, из нижнего положения поднимите камеру вверх и через 1,5-2 секунды опустите вниз. В процессе фотографирования можно управлять наклоном камеры колесиком на пульте управления. Фотографирование не остановится. Для того чтобы остановить фотографирование, из нижнего положения поднимите камеру вверх и сразу опустите вниз. Также АФС можно производить в ручном режиме, стиками регулируя скорость и направление движения квадрокоптера. Фотографирование при этом можно осуществлять с помощью модуля Ashot, либо по таймеру каждые 2 секунды (настраивается в полетном приложении). В полетном приложении при этом виден пройденный маршрут и можно контролировать параллельность галсов для обеспечения необходимого перекрытия и исключения не охваченных зон. Данный режим можно рекомендовать только опытным пользователям, при небольших объемах съемки, а также в местах с высокой вероятностью сбоя навигационной системы (зоны глушения сигналов). Во всех случаях, рекомендуется строить маршруты так, чтобы квадрокоптер в основном летал под углом в 90 градусов к направлению ветра. При полетах над рельефом с перепадами высот, рекомендуется летать вдоль изолиний рельефа. Настройка камеры- Переключатель режима камеры: положение A (режим приоритета диафрагмы). — ISO (светочувствительность): 100- Aperture (диафрагма): 2. 8-8, в зависимости от освещенности. Очень важно чтобы выдержка при фотографировании была не короче 1/1600. С выдержкой 1/2000 и короче, перестает работать механический затвор — что ухудшает качество фото. — White Balance (баланс белого): Sunny или Cloudy- Style (стиль): Landscape- Color (цветовая схема): None или Normal- Image Size (пропорции фото): 3:2- Image Format (формат изображения): JPG- Mechanical Shutter (механический затвор): включено- Фокусировка камеры: режим M (ручной) и перевести фокус в бесконечностьРаскладка опознаковПри проведении АФС на квадрокоптере с GNSS приемником, мы получаем точные координаты центра каждого кадра. Это дает возможность строить цифровую модель местности и привязывать её в плане, достаточно точно и без опознаков. Не смотря на это, мы рекомендуем использовать несколько опознаков для контроля получаемых данных. А также, хотя бы один опознак нужен для автоматической калибровки камеры в фотограмметрической программе и уточнения высоты модели. Опознак — это хорошо различимый на фото объект, с ярко выраженным центром с известными координатами. В качестве опознака можно использовать ранее созданные элементы (например дорожная разметка) или создать свои (краской или полотнищами в виде Х или Г, пластиковыми тарелками). Координаты опознаков обычно определяют методом RTK. Раскладывать опознаки лучше в местах с наибольшей и наименьшей высотами снимаемой территории, а также ближе к её границам. Для подключения и настройки базовой станции, воспользуйтесь инструкцией производителя. В качестве базовой станции можно также использовать GNSS приемники референцной геодезической сети. Вы можете запросить Rinex файл измерений, покрывающий зону и время полета квадрокоптера. Перед полетом необходимо убедиться что станция активна и запись измерений производится. Так как самая быстрая частота записи таких станций в основном составляет 1 Гц, коптер перед взлетом необходимо выдержать включенным не менее 2-х минут на открытой местности, для сбора достаточных данных, если базовая станция находится дальше 10 км. Максимальное расстояние до референцной базовой станции: не далее 50 км;Подготовка квадрокоптера1. После включения квадрокоптера и размещения его на открытом пространстве, подождите не менее 2-х минут для поиска спутников и сбора достаточного количества данных. В это время включите приложение DJI GO4 и убедитесь в отсутствии критических предупреждений или ошибок. Отформатируйте SD карту в квадрокоптере!3. Проверьте состояние компасов квадрокоптера, показания должны находиться в зеленой области. Если показания колеблются в желтой или красной зоне, необходимо устранить источник магнитных наводок, либо изменить место взлета. При необходимости произведите калибровку компасов. Калибровку можно производить только вдали от потенциальных источников магнитных наводок (металлические объекты, ЛЭП, стоянки, железобетонные конструкции и т. Если полет производится при низких температурах, после взлета дайте коптеру повисеть на месте пару минут, для разогрева батареи. Выполняйте полет плавно, без резких наборов высоты и продолжительных повышенных нагрузок. Перед взлетом убедитесь что квадрокоптер поймал минимум 8 спутников. Для взлета используйте ровную, твердую, не пыльную поверхность. Можно стартовать с серого транспортировочного кейса. Не взлетайте с капота или крыши автомобиля, т. это вызовет проблемы с компасом. При ручной посадке, если площадка ограниченная, квадрокоптер можно поймать рукой за основание ножки. После этого опустите правый стик пульта управления (газ) до упора вниз и подержите так 3 секунды, пока моторы не остановятся. Во время полета, в том числе в автоматическом режиме, следите за телеметрией квадрокоптера и его положением в пространстве, а так-же за корректностью прохождения маршрута. Будьте готовы в случае необходимости, перейти на ручное управление. ВНИМАНИЕ! Не начинайте или не продолжайте полет, если вы обнаружили какое-то не нормальное поведение квадрокоптера (появление не понятных вам сообщений или предупреждений в приложении, отклонение от маршрута, потеря сигнала управления и/или трансляции видео на малых расстояниях, потеря спутников без видимых причин, не адекватный отзыв на ручное управление и т. В случае наступления данных обстоятельств, необходимо прекратить полет до выяснения причин!9. Если потребуется сделать несколько вылетов на один объект, то при разрядке батареи, приземлите коптер. Необходимо вынуть аккумулятор, плотно вставить новую батарею до щелчка и включить питание. Подождите не менее 2-х минут и взлетайте снова. При смене аккумулятора, обращайте внимание на температуру разъема питания. Если разъем сильно нагрелся, не используйте данную батарею без технического обслуживания контактов. После окончания каждого полета, на этапе посадки квадрокоптера, наблюдайте за световым индикатором приемника AGNSS (светодиод в переднем левом луче). Индикатор должен МОРГАТЬ ЗЕЛЕНЫМ. Если индикатор МОРГАЕТ или ГОРИТ КРАСНЫМ, это может сигнализировать о проблемах с записью спутниковых данных. Необходимо перезапустить квадрокоптер и повторить вылет еще раз. После завершения полетов, выключите квадрокоптер и поисковый маяк. Затем, вашу базовую станцию. Не летайте рядом с запретными зонами (аэропорты, стадионы, тюрьмы, посольства, воинские части, правительственные и силовые объекты, оборонные предприятия и т. Работа с поисковым маякомНа все наши геодезические квадрокоптеры, устанавливаются радиомаяки для поиска модели при нештатных ситуациях. Маяк подключается к GNSS антенне и может передавать координаты местонахождения коптера, а также возможен поиск методом «охота на лис». Маяк автоматически включается при включении квадрокоптера и заряжает свой встроенный аккумулятор для автономной работы в течение 14 дней. Если за это время маяк не будет выключен, он перейдет в спящий режим для предотвращения переразрядки встроенного аккумулятора. Тем не менее, рекомендуем самостоятельно выключать маяк после полетов. Это позволит сохранить полный заряд встроенного аккумулятора и обеспечит максимальное время работы маяка в экстренной ситуации. Выключение маяка производится удаленно, с помощью рации:1. Поднесите рацию к коптеру. В течение 7 секунд, пошлите тоновый вызов на частоте 1750Гц. Маяк ответит обратным отсчетом: «три», «два», «один». Пока идет отсчет, нужно еще раз послать тоновый вызов на 3 секунды. Маяк издаст звуковые сигналы и выключится. Обработка полученных данныхКаждый *. ubx файл составляет около 8МБ для 20-минутного полета с GPS + GLONASS 5 Гц. Количество фотографий зависит от временного интервала между ними. Если интервал Ashot составлял 1,3 сек. , то это 1000 фотографий. Если интервал был 1,8 сек. , то это около 700 фотографий. Для преобразования UBX в формат RINEX используйте бесплатное программное обеспечение RTK lib. Для более полной обработки данных, без дополнительного ПО, используйте телеграм-бот TeoBox PPK Bot. Обработка спутниковых данных в телеграм-боте TeoBox PPK Bot. Для загрузки данных, откройте бота, введите команду /start, и следуйте дальнейшим инструкциям. Вам понадобяться файлы с приемника квадрокоптера, с базовой станции и файл PRJ с параметрами системы координат. На выходе вы получите TXT файл, который вместе с фотографиями с квадрокоптера, необходимо загрузить в программу Teobox. На выходе вы получите переименованные и упорядоченные фотографии а также CSV файл с координатами центров снимков. Далее эти файлы можно использовать в фотограмметрических программах. Конвертирование Ubx файлов с помощью пакета RTK lib.
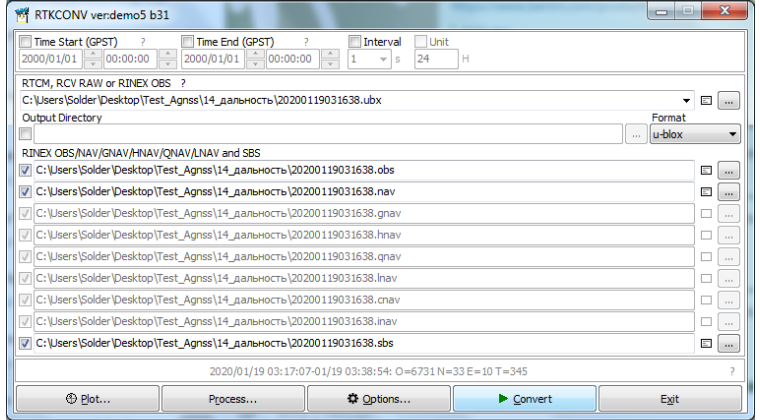
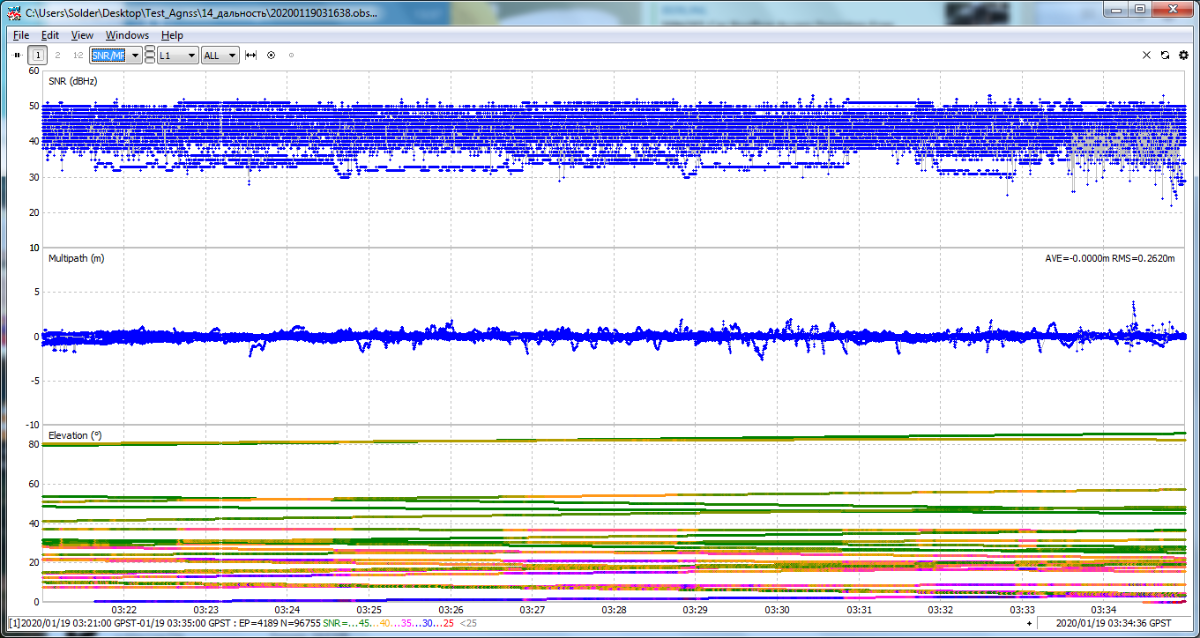
После конвертации, создадутся два файла *. obs и *. nav. Проверка данных OBSЕсли вы все сделали правильно, в нижней части окна RTK Conv появятся следующие строки:
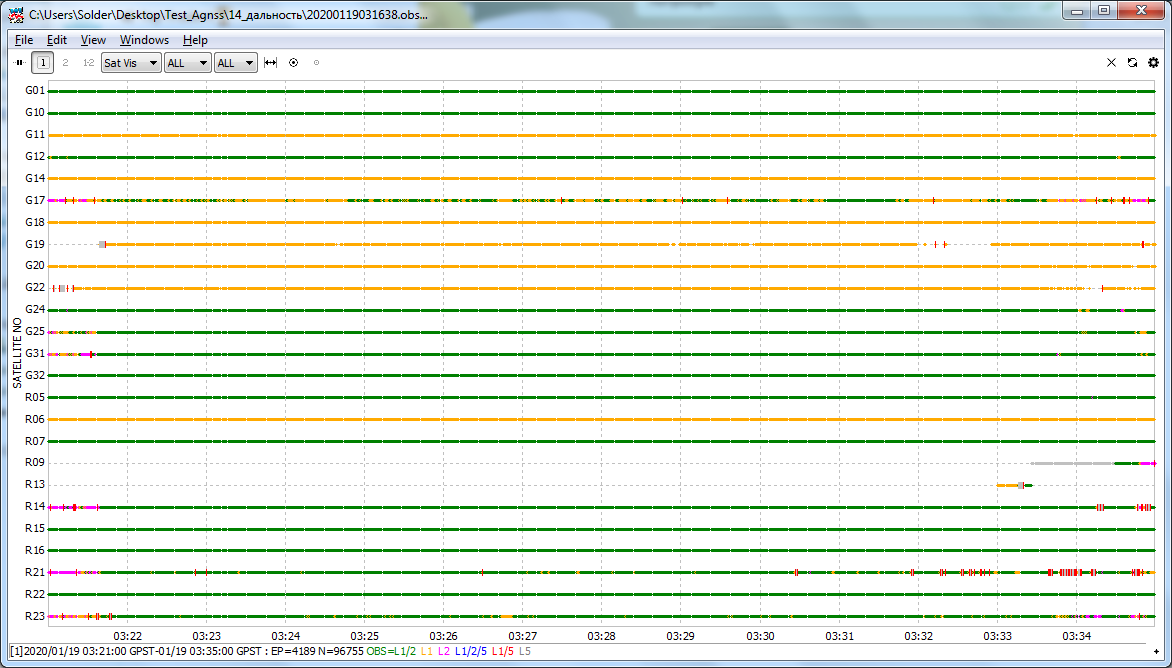
Откроется окно со спутниками, видимыми во время полета (см. скриншот). Для хорошего результата в данных не должно быть пробелов и циклических сдвигов. Циклические проскальзывания происходят, когда сигнал GNSS блокируется, например зданиями.
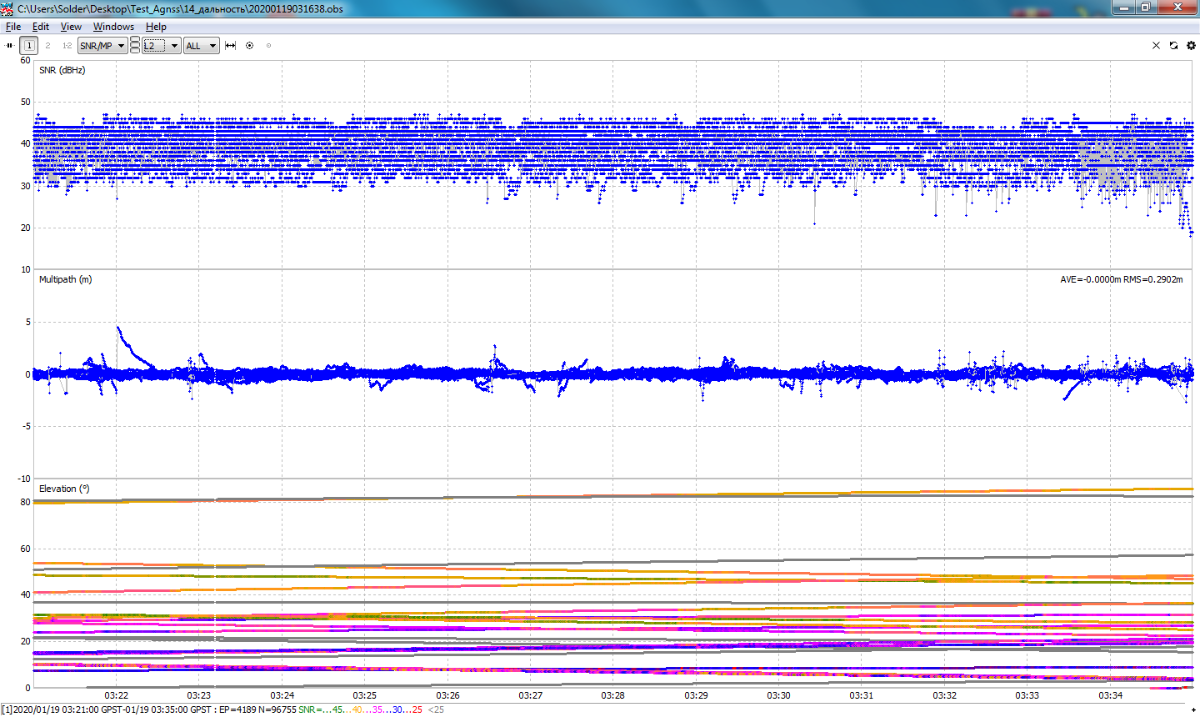
Если в выпадающем меню выбрать SNR/MP/EL (см. скриншот), то можно увидеть качество данных GNSS и наличие в них шума. Для хорошего результата, SNR должен быть в диапазоне 30-50 дБ/Гц, и не должно быть никаких циклов скольжения.

Большинство моделей беспилотников попадают на прилавки магазинов откалиброванными со специальной маркировкой на упаковке. Но настройка квадракоптера все же требуется, так как калибровка производителей может «слететь» в результате небрежной транспортировки. Рассмотрим подробнее как самостоятельно настроить квадрокоптер и для чего нужно триммирование. Принцип работы квадрокоптераРабота квадрокоптера основана на принципах механики. Полет регулируется ускорением или замедлением пропеллеров. Квадрокоптер не может самостоятельно сохранять устойчивое положение во время полета. Для этого конструкция оснащена бортовым компьютером. На основании показаний гироскопов и акселерометров, контролер позволяет беспилотнику находиться в воздухе в определенном положении.

Назначение настройки при полетеДля чего нужна настройка квадрокоптера? Без нее дрон будет кренить на один борт и не сможет лететь в пункт назначения, определенный владельцем. Управлять полетом в таких условиях невозможно и есть риск привести беспилотник в негодность раньше времени. Те, кто не умеют обращаться с устройствами, списывают проблемы с полетом на заводской брак, низкое качество товара и на другие причины. На самом деле требуется установка настроек. Как определить, нужно ли откалибровать квадрокоптер? Достаточно провести короткий полет, и просмотреть, как беспилотник ведет себя в пространстве. Для этого устройство поднимается в воздух хотя бы на полметра. Если траектория полета хаотичная – ему требуется калибровка. Слишком низкая высота мешает настраивать машину. Квадрокоптер держится в воздухе благодаря воздушной подушке, которую создают винты.

Типы калибровкиЕсть несколько видов триммирования:
- Механическое — при незначительном отклонении необходимо подкрутить регулятор тяги;
- Автоматическое –если нужно сместить триммер на 5 позиций и больше. Устройство настраивается с пульта дистанционного управления.
Механическая калибровка квадрокоптера требует всего нескольких минут, а вот автоматическую выполнять сложнее и дольше. Выполняется работа с переключателями. Один раз откалибровать устройство иногда мало и требуется калибровка до тех пор, пока беспилотник не встанет в нужное положение. При наклоне влево треммирование выполняется в правую сторону для равновесия. Подготовка устройства к полетуПеред тем, как запустить дрон, нужно выполнить несколько простых шагов:
- Вставить аккумулятор внутрь устройства без включения. (не относится к моделям, со встроенной батареей);
- Чтобы настройка прошла быстрее, требуется поставить дрон на ровное место (к примеру на стол);
- Далее нужно взять квадрокоптер в руки и включить его, а затем поставить на поверхность;
- В новых моделях синхронизация гироскопов занимает примерно 10-20 секунд.

ТриммерДжостики для квадрокоптера обычно имеют стандартные кнопки и функции:
- На джостике есть правый и левый стики. В правом – вертикальное перемещение дрона и наклон вперед, а в левом – горизонтальное передвижение;
- Верхняя левая кнопка отвечает за переключение скорости;
- Верхняя правая кнопка – поворот устройства на 360 градусов;
- Слева по направлению от правого стика – переключатель движения «вперед-назад»;
- Переключатель режимов находится под правым стиком.
- Кнопка включения и выключения квадрокоптера располагается в центре джостика.
- Под кнопкой включения – дислпей, отвечающий за расходы. Высокие расходы для быстрых полетов, низкие- для малой высоты.

Определение проблемКак выполнять триммирование исходя из положения дрона в пространстве? Есть несколько основных проблем во время полетов:
- Если наблюдается крен в правую или левую сторону, то проблема в правом рычаге и требуется регулировка по крену.
- Если устройство без команды пользователя наклонилось вперед, а потом назад и в обратном порядке, выполняется регулировка по тангажу левым стиком.
- Если в движении есть и крен и наклон, настраивать нужно оба стика.
Триммирование позволяет настроить полет, чтобы избежать столкновений с домами и деревьями. Это не только продлит срок службы квадрокоптера, но и обезопасит окружающих людей. Вся информация о том, как откалибровать конкретный беспилотник указана в инструкции по эксплуатации. Также в ней есть сведения о том, требуется ли калибровка для дрона. Но, в некоторых моделях, особенно тех, что относятся к категории бюджетных, инструкция отсутствует. Рекомендуем проводить калибровку, так как она поможет по крайней мере, познакомиться с джостиком и привыкнуть к стикам. Лайфхак от любителей квадрокоптеров: рекомендуется сразу переходить на высокие расходы, не засиживаясь на низких, чтобы привыкнуть к чувствительности стика. Видео
Дрон не может зависать ровно. Что делать?Новые пилоты беспилотных летательных аппаратов достигают точки, когда они могут успешно запустить свой беспилотник и заставить его зависнуть на месте. Они видят в Интернете видео дронов, парящих совершенно неподвижно, не отклоняясь ни в одну сторону, ни в другую, и чувствуют разочарование от того, что их беспилотник не может сделать то же самое. Существует множество причин, по которым ваш беспилотник может наклоняться в одну сторону. Факторы, которые вызывают наклон дрона, включают поверхность, с которой он запускается, калибровку акселерометра, настройки контроллера, несоосные пропеллеры или, возможно, неисправный двигатель. Необходимо учитывать несколько факторов, которые могут привести к тому, что ваш беспилотник наклонится в определенном направлении. Эту проблему можно решить, сделав шаг назад и оценив каждый аспект отдельно. Мы собрали краткое изложение общих причин и решений, чтобы как можно скорее поднять вас в воздух. Запуск с наклонной поверхностиНовые пилоты беспилотных летательных аппаратов часто совершают распространенную ошибку, когда берут свой беспилотник в его первый рейс. Они запускают свой беспилотник с неровной поверхности. Это приводит к смещению кардана камеры дрона, из-за чего кажется, что отснятый материал наклоняется в одну сторону. Калибровка акселерометраПредположим, вы обнаружите, что ваш недавно построенный беспилотный летательный аппарат склонен наклоняться в одну сторону, а не в другую. Возможно, возникла проблема с вашей первоначальной калибровкой акселерометра. Калибровка акселерометра вашего дрона не всегда является обязательным шагом, и из-за этого многие новые пилоты упускают этот шаг из виду. Несоответствие настроек контроллераЕсли вы не можете визуально определить проблему вашего дрона, проблема может быть связана с вашим контроллером. Контроллер, у которого неправильно настроены параметры канала тангажа, крена и рыскания, может привести к дрейфу вашего дрона. Калибровка компасаСовременные беспилотные летательные аппараты зависят от их инерциального измерительного блока и компаса, работающих в тандеме. Если один из этих блоков неправильно откалиброван или один из этих компонентов неисправен, ваш беспилотный летательный аппарат может неправильно интерпретировать получаемую информацию, что приведет к ее смещению. СпешкаВсе приходят в восторг от перспективы полета на своем беспилотнике. В конце концов, это приятное хобби. Пилоты беспилотных летательных аппаратов часто забывают, что после включения дрона ему требуется несколько секунд, чтобы сориентироваться перед запуском. Если вы включите свой беспилотный летательный аппарат, немедленно поднимете его и начнете ходить, он не будет знать, в какую сторону, что приведет к неправильной настройке гироскопа. ПропеллерыПропеллеры вашего дрона оказывают нисходящую силу, создающую подъемную силу. Когда эта сила неравномерно распределяется по различным двигателям вашего дрона, создается неравномерный подъем, в результате чего дрон дрейфует в определенном направлении, и иногда это препятствует успешному запуску дрона. Если вы заметили, что при попытке запустить свой беспилотный летательный аппарат наклоняется вперед или назад,велика вероятность того, что пропеллеры ориентированы неправильно. Если это не решит проблему, подумайте о покупке нового набора пропеллеров и начните с нуля, уделяя пристальное внимание ориентации каждого пропеллера и гарантируя, что они направлены правильно вверх. Неисправный двигательНеисправный двигатель может быть причиной того, что ваш беспилотник наклоняется в одну сторону. Современный беспилотный летательный аппарат использует четыре мощных двигателя для создания достаточной подъемной силы, чтобы поднять его в воздух. Если один двигатель не работает на пике, это может привести к ненужной нагрузке на остальные три двигателя, что, в свою очередь, может привести к выходу двигателя из строя. Центр тяжестиРаспределение веса дрона играет решающую роль в обеспечении того, чтобы он летал на одном уровне. Если вес смещен от центра тяжести дрона, он будет наклоняться в этом направлении. Электромагнитные помехиСовременные дроны используют гироскопические датчики, чтобы поддерживать их на одном уровне. Большие магнитные поля создают помехи в этой системе, которые могут привести к ее хаотичному полету. Одним из наиболее распространенных источников больших электромагнитных полей являются высоковольтные линии электропередачи. Эти огромные сооружения несут множество токов, которые могут повлиять на производительность вашего дрона. ПогодаНеблагоприятные погодные условия не позволяют дронам реализовать свой максимальный потенциал. Легкий ветерок может заставить ваш беспилотник слегка дрейфовать, но сильный ветер определенно заставит его двигаться в том направлении, в котором дует ветер. Особенно жаркие дни также влияют на производительность двигателя вашего дрона. Черные двигатели, особенно, более восприимчивы к солнечному теплу. Вывод
- Как выявить откалиброван квадрокоптер или нет
- Как откалибровать квадрокоптер Syma X5C
- Триммирование квадрокоптера
- Какие кнопки есть на пульте управления Syma X5C

Почти 90% готовых квадрокоптеров, которые получают покупатели, уже готовы к полету. На них имеется соответствующая маркировка Ready to Fly. Но перед полётом владелец нового квадрокоптера обязательно должен заняться калибровкой самостоятельно.
Как выявить откалиброван квадрокоптер или нет
Довольно просто: произведите тестовый полет. Если траектория движения квадрокоптера меняется хаотично, значит, ему необходимо триммирование.
Начинается процесс калибровки с проверки джойстиков. Включите пульт управления. Обычно правая часть отвечает за вертикальное управление, левая – горизонтальное. Далее поднимите дрон в воздух, можно на полметра. А теперь попробуйте задать ему направление. Кренит в правую сторону. Проведите регулировку по левому стику. Клонит вниз. Тогда откалибруйте по правому стику.
На данном этапе важно понять, какой настройкой вы будете пользоваться.
Есть два варианта:
- Первый – механическая калибровка. Используется тогда, когда отклонение не очень значительно, и представляет собой подкручивание регулятора тяги.
- Второй вариант – автоматическая калибровка. Применяется при необходимости смещения триммера на 5 и более позиций. Представляет собой настройку работы дрона непосредственно с пульта управления.
Как откалибровать квадрокоптер Syma X5C
Для начала изучите кнопки пульта управления, за что каждая отвечает, функционал. Включите коптер. Для этого переводим в режим «On» задвижку на самом дроне. Затем включаем пульт и тянем левый стик вниз (до упора).
Теперь наберите высоту и отследите, в каком направлении «заносит» ваш коптер. Если видите, что есть проблема, попробуйте сбросить настройки. Для этого нужно установить дрон на плоскую ровную площадку, включить, потянуть левый и правый стики вниз и налево. Подождите, пока настроится гироскоп. Затем сделайте то же самое, но направо (калибровка акселерометра).
Проведите повторный запуск коптера. Не помогло? Тогда приступаем к следующему этапу – триммированию (изменению оборотов мотора).
Триммирование квадрокоптера
- По рудеру. Если коптер кренится в правую сторону, то нужно триммировать влево. И наоборот;
- По тангажу. Видите, что дрон при полете кивает вперед, триммируйте назад. Кренит назад – триммируйте вперед.
Попробуйте сделать «флип» — 360-градусный разворот коптера по любому из четырех основных направлений. Для этого нажимаем одновременно верхнюю кнопку, и тянем правый стик в необходимую сторону.
При триммировании важно помнить, что у квадрокоптеров Syma разработчиками предусмотрена два режима расхода энергии (высокий – высокие обороты, низкий – слабые). В зависимости от того, как планируете использовать дрон, проверьте качество работы коптера на данных режимах.
Часто во время калибровки Syma X5C возникает проблема с неправильной установкой лопастей. Моторы могут функционировать на 100% верно, а пропеллер не крутится. В данном случае необходимо учитывать схему сборки и инструкцию, которые прилагаются к устройству.
Какие кнопки есть на пульте управления Syma X5C

- Левый и правый стики (джойстики);
- Переключение режимов (слева от левого стика);
- Поворот на 360 градусов (справа наверху);
- Переключатель «вперед-назад» (слева от правого стика);
- Переключатель режимов (под правым стиком);
- Кнопка «вкл-выкл» (в центре, над дисплеем).

Вас приветствует команда mykvadrocopter. ru! Наше хобби — дроны. Здесь мы описываем их модели, характеристики, делимся новостями и выкладываем инструкции по применению. Вступайте в наше сообщество любителей дронов в Контакте.
Что делать, если дрон улетел и не вернулся?
Это может быть небольшим глюком геолокации. Если перед полетом вы откалибровали дрон, он не должен улететь далеко. Поищите в ближайших окрестностях, ориентируясь на последние показатели приборов. Если по соседству нет частных владений, над которыми запрещено летать, есть шанс обнаружить дрон в ближайших кустах.
Как снимать видео с дрона?
Продумайте, что именно вы хотите снять, до полета, а не после. Некоторые дроноводы предпочитают включать режим видеосъемки с момента взлета и не выключать до посадки, но без конкретной идеи или сценария съемки вы получите много лишнего материала, который будет трудно монтировать и жалко выкидывать. Никогда не старайтесь использовать весь отснятый материал — творчество заключается именно в выборе лучших кадров.
С другой стороны, может возникнуть ситуация, когда нет ни одного хорошего кадра. Например, вы облетели по кругу красивый маяк, но во время полета резко поменялся ветер или вы ошиблись в управлении, камера дрона часто дергалась, плавность съемки была потеряна и теперь отснятое выглядит некрасиво. Не спешите выбрасывать материал, попробуйте исправить на монтаже. Например, если камера дергалась в полете, ускорьте воспроизведение. Так любой рывок станет незаметен.
Совет: во время монтажа накладывайте на видео музыку. В идеале каждый поворот дрона должен поддерживать ритмический рисунок мелодии. Это поможет создать дополнительное настроение. Например, дрон пересекает горный хребет, а затем открывается вид на просторную долину, озеро или море. Постарайтесь, чтобы этот момент совпал с замедлением в музыке или паузой. Это придаст сюжету дополнительную эмоциональную глубину.
Виды калибровок
Существует два способа настройки, триммирования и калибровки квадрокоптеров:
- . Если отклонения дрона в полете совсем незначительные, можно вручную подкрутить регулятор тяги, расположенный между сервоприводом и тарелкой конструкции.Механическое триммирование проводят на земле, а после пробного полета при необходимости повторяют
- . Если дрон отклоняется от курса сильно и заметно, его настраивают при помощи пульта. Специальный триммер переводят в положение, противоположное крену аппарата.Автоматическую настройку осуществляют непосредственно в воздухе
Перед автоматической калибровкой дрона рекомендуется внимательно изучить инструкцию, чтобы разобраться в устройстве пульта управления и самого аппарата.
Грабли
В случае с корректировкой мощностей моторов необходимо не допускать слишком низких и слишком высоких мощностей, при которых стабилизация работает неверно.
С одной стороны, существует минимальная мощность, которую уменьшить нельзя, или моторы просто остановятся. С другой, уменьшение мощности может быть необходимо для правильной работы алгоритма. Если мощность (throttle) уменьшить слишком сильно, ПИД может «зашкаливать» в нижнюю сторону. Чтобы решить эту проблему, мы ограничиваем доступные пилоту мощности.
Другая опасность — влияние побочных вибраций от моторов на
Если хотите снимать пейзажи и панорамы
Попробуйте начать с DJI Мavic 2 Pro. Чтобы научиться его пилотировать, вам придется приложить больше усилий (и потратить больше денег), но зато потом сможете направлять дрон между елок и опор мостов, исследовать с воздуха крыши и кроны деревьев, облетать естественные препятствия, чтобы увидеть, что за ними скрывается, на расстоянии до 10 километров от себя. При этом можно еще взлететь на несколько километров ввысь.
Стоимость модели начинается от 126 тысяч рублей. Это немало, но рынок предлагает и более бюджетные модели по цене от девяти тысяч рублей. Чтобы определиться с выбором, посмотрите обзоры на Ютубе.
Итак, вы выбрали и купили свой первый дрон. Прежде чем его запустить, проверьте, что карта памяти установлена, аккумуляторы полностью заряжены и их несколько. Звучит банально, но именно об этом легко забыть.
Обязательно изучите инструкцию: там будет указано, как запускается функция аварийного самоотключения (CSC). Она есть во всех устройствах, и везде может быть разная комбинация кнопок и джойстика. Например, на дронах моделей Phantom 3 или 4 аварийное отключение двигателей происходит при переключении двух джойстиков по углам контроллера вниз. Не зная об этом и управляя дроном в экстренной ситуации, вы можете случайно отключить и уронить его, и хорошо, если не кому-нибудь на голову. В общем, не стоит учиться управлять аппаратом методом «научного тыка».
Какое приложение для управления выбрать?
Приложений для запуска дронов много, но мы рекомендуем универсальное и прекрасное во всех смыслах UAV Forecast. Программа сразу покажет и температуру воздуха, и скорость ветра на конкретной высоте, даст прогноз погоды на ближайшее время и отразит на дисплее вашего смартфона или планшета карту с зонами, в которых запрещены полеты. В приложении даже есть палитра для дальтоников!
Данные UAV Forecast подходят для любой модели летающего устройства.
Перед каждой поездкой за границу не забудьте изучить, какие в конкретной стране правила перевозки и использования дронов. В большинстве государств, включая Россию, запуск запрещен только в определенных местах: зоны аэропортов, охранные зоны, частные владения, национальные парки, места проведения массовых мероприятий и тому подобное.
В отдельных странах обязательно требуется заранее регистрировать дрон, если его вес свыше 250 граммов. Может потребоваться оформление страховки гражданской ответственности.
В некоторых странах, например в Индии, требуется на месте пройти обучение и получить лицензию на управление дроном. Так что в короткую поездки в такие государства брать с собой дрон бессмысленно.
Многие путешественники сталкивались с тем, что во Вьетнаме сотрудники таможенной службы могут попытаться изъять дрон, пообещав вернуть его, когда вы будете выезжать из страны. Если маршрут не кольцевой — условно говоря, прилетели в Ханой, а вылететь хотите из Хошимина, — дрон останется в подарок таможенникам. Здесь поможет только сила убеждения и ссылки на внутренние нормативные акты Вьетнама, которые позволяют провозить и использовать любительские дроны на территории этой страны.
Важно также изучать правила провоза и транспортировки дронов на сайте конкретной авиакомпании, самолетом которой планируете путешествовать. Как правило, они стандартные: квадрокоптеры можно перевозить в багаже или в ручной клади. В последнем случае аппарат будет лучше защищен от повреждений. Важно перевозить батареи вместе с дроном или герметично упаковывать запасные аккумуляторы в багаж.
Информацию о правилах пилотирования и применения дронов в различных странах мира ищите на специальных регулярно обновляемых сайтах.
Если вы все-таки решите запустить дрон там, где нельзя, и вас застукают на месте правонарушения, самым безобидным последствием может стать штраф. Однако правоохранители могут еще и начать ловить или сбивать ваш коптер, используя для этого специальные технические средства. Самые распространенные из них — «глушилки», или блокираторы, дронов, то есть специальные устройства, создающие и распространяющие радиопомехи на определенное расстояние в заданном частотном диапазоне. Обычно эти устройства применяются в зонах, где полеты запрещены.
Чтобы не столкнуться с «глушилкой», вспоминаем полезные приложения с обозначением запретных зон. Но дрон все равно залетел в одну из них? Без паники. Ситуация сложная, но не безнадежная. Отключайте спутники и возвращайте дрон на базу в ручном режиме. Включите воображение и представьте себя настоящим пилотом на войне. Вас обстреливают, уже есть повреждения, но нужно дотянуть до своих.
В награду получите потрясающие виды мест, которые обычно снимать с дрона запрещено. Вот например, что снимают увернувшиеся от «глушилок» коптеры над природным памятником «Двенадцать апостолов» в Южной Австралии.
Некоторые страны для борьбы с нарушающими квадрокоптерами используют совершенно экзотические методы: специально обученных орлов, сетки, расстреливающие дрон базуки.
Калибровка простых моделей квадрокоптеров
Чтобы откалибровать квадрокоптер перед первым запуском, нужно перевести оба стика пульта управления в нижнее положение, а затем влево до упора. Когда прозвучит длинный звуковой сигнал, а светодиодная подсветка на дроне перестанет мелко моргать, дрон откалиброван и готов к запуску.
Если после калибровки датчиков, квадрокоптер все-таки тянет в сторону, для его качественной стабилизации нужно произвести триммирование (точную настройку).
Для этого используем триммеры снизу и слева от правого стика на пульте ДУ.
Если квадрик уводит влево, кликните несколько раз на кнопку триммера «вправо». Если замечаете крен вправо, то нажмите на триммере «влево» несколько раз. По аналогии настройте полет дрона вперед/назад.
В идеале, при запуске двигателей дрон должен подниматься в воздух и удерживать положение «без заносов». Добиться этого можно только в закрытом помещении или в абсолютно безветренную погоду.
Опытные пилоты производят триммирование в полете (нужно поднять дрон на высоту не менее 0,5 метра). Как начинающий летчик, можете пробовать настроить коптер на земле. То есть взлететь, увидеть в какую сторону заносит дрон, приземлиться, сделать несколько кликов на нужную кнопку триммера, а затем снова подняться в воздух, чтобы ощутить разницу. И так до тех пор, пока квадрокоптер не зависнет идеально в воздухе.
https://youtube.com/watch?v=cBs1nOxrSrM%3Ffeature%3Doembed
Медленно, но уверенно.

Если точная настройка квадрокоптера (триммирование) не дает нужного эффекта, возможно дело не в гироскопах. Может случиться, что двигатели расположены не симметрично или повреждены лопасти. Еще одна возможная причина – какому-то из моторчиков не хватает тяги, чтобы ровно поднять дрон в воздух. В этом случае не обойтись без опытного помощника или даже мастера.
Не спешите выжать из нового квадрика все соки в первый же день полетов!
Помните, что первые запуски, это для него всего лишь тестирование и проверка работоспособности, а для вас – проверка на выдержку.
Поэтому, не спешите, иначе рискуете разочароваться до того, как новинка принесет вам наслаждение.
Квадрокоптер с gps своими руками. подробная инструкция по сборке. часть 1 — сборка.
Давайте продолжим тему сборок квадрокоптеров своими руками. В прошлый раз я построил шустрый гоночный квадрокоптер. В этот раз построим бюджетный квадрокоптер, на борту которого будет барометр для вычисления высоты и датчик GPS с компасом для реализации различных функций, таких как автоматический возврат домой, полеты по точкам, удержание высоты и позиции. Но теперь дрон будет на прошивке INAV.
Сразу перечислю все комплектующие, использованные в проекте (Все ссылки ведут на алиэкспресс. Переходя по ссылкам Вы поддерживаете проект! Спасибо Вам за это!):
Полетный контроллер — дешевый клон очень
распространенного ПК Omnibus F4 V3 Pro. Имеет на борту 3 UART, возможность подключения приемника по SBUS и IBUS, разъем для подключения GPS модуля, барометр и слот карты памяти для записи параметров полета.
Рама для квадрокоптера. Не менее распространенная Martian II в размере 250 мм. Бюджетная, достаточно прочная и очень вместительная.
Позволяет установить по желанию как 5-ти дюймовые, так и 6-ти дюймовые пропеллеры.
Моторы я выбрал бюджетные Readytosky RS 2205 2300kv. Регуляторы оборотов — Little Bee 30А. Регуляторы оборотов — Little Bee 30А. Курсовая камера — Foxeer Monster Pro. Видеопередатчик— AKK K33 5,8 GHz. Видеопередатчик— AKK K33 5,8 GHz. GPS модуль — BN-880 с компасом.
Приемник — модернизированный Flysky fs-ia6b (14-канальный с RSSI). Купить можно здесь.
Комплектация
Разработчик поставляет на рынок две версии комплектации. У них не имеется официального названия. Поэтому пока можно определить их как малый и большой вариант комплектации. Большой отличается наличием запасной батареи и специальным переносным чехлом темного и светлого серого оттенка.

В малый комплект войдут:
1) Дрон XIRO Xplorer Mini
2) Интеллектуальная батарея 3S 11. 4В 1650мАч 18. 81Втч LiPo
https://youtube.com/watch?v=videoseries%3Flist%3DPLHDuupvlljd4fXCOGyeLwkplAPmvR5mY6
3) 4 × несущих винта
4) 4 × защиты несущих винтов
5) Зарядное устройство
6) Блок питания 220В для ЗУ
7) USB кабель
9) Инструкция и иллюстрации по первому запуску

Матчасть
Определим невязку — разницу между требуемым и реальным значением некоторой величины:
— требуемое значение величины (угол с джойстика),
— текущее значение величины (угол с датчика).
Зададим момент сил для угла
— дифференциальная составляющие.
https://youtube.com/watch?v=FUILqaMYn9o%3Ffeature%3Doembed
Знак минус говорит о том, что при положительных
воздействие направлено против отклонения.
В чём смысл этой формулы? Напишем уравнение динамики, положив
— момент инерции.
Для простоты уберём интегральную составляющую (
чем больше пропорциональная составляющая, тем более «резкой» будет реакция на воздействие (больше амплитуда). Чем больше дифференциальная составляющая, тем быстрее будет происходить затухание (больше декремент).
Из модели затухающих колебаний получаем выражение для коэффициента затухания:
Из возможных решений уравнения нам подходит режим, близкий к критическому (граница апериодичности,
) — нет отрицательного «перелёта» графика, переходный процесс короткий. Как видно, критический режим задается всего одним соотношением на коэффициенты ПИД-регулятора.
Интегральная составляющая устраняет статическую ошибку. Пусть невязка
Более подробный анализ уравнения ПИД-регулятора можно найти в других статьях: раз, два.
Настройка квадрокоптера с gps (inav).
Далее я опишу Вам самые основные настройки квадрокоптера (в основном скриншоты), которых будет достаточно для того, чтобы он без проблем полетел. На некоторых заострю ваше внимание. Чтобы наиболее полно изучить все настройки INAV рекомендую обратиться к документации на GitHub.
Ну вот мы прошили квадрокоптер, подключили к INAV Configurator. Первая вкладка, которую мы увидим — Setup и на ней будут видны два красных крестика, говорящие нам о том, что нужно откалибровать акселерометр и, в дальнейшем, компас.
Вообще блок Pre-arming checks на этой вкладке показывает все ли в порядке с подключениями и настройками. Если по какой-либо причине после всех настроек у вас квадрокоптер не будет Arm, то идите на эту вкладку и выясняйте причины.
Идем на вкладку Configuration и выбираем AUTO там, где указано. Здесь и далее после каждой операции не забываем сохранять и перезагружать.
Если вы все сделали правильно, то на вкладке Setup в блоке Pre-arming checks все будет зелёное.
Вкладка порты (инициализируем IBUS и GPS модуль). к этой статье. В ней подробно описано как изменить направление вращения мотора в BLHeli Configurator. MAG Alignment (важная настройка квадрокоптера с GPS) зависит от того, какой стороной и в каком направлении вы установили компас. Другими словами, подбирая эту настройку, мы как бы заставляем работать в унисон компас и акселерометр. Подбором этого значения, каждый раз сохраняя конфигурацию, вы должны добиться того, чтобы на вкладке Setup при наклоне квадрокоптера в ту или иную сторону, картинка на экране повторяла наклоны, но не вращалась!!! Если помимо наклона, происходит вращение, то продолжайте подбирать настройку дальше, пока движения не будут точно совпадать. MAG Alignment (важная настройка квадрокоптера с GPS) зависит от того, какой стороной и в каком направлении вы установили компас. Другими словами, подбирая эту настройку, мы как бы заставляем работать в унисон компас и акселерометр. Подбором этого значения, каждый раз сохраняя конфигурацию, вы должны добиться того, чтобы на вкладке Setup при наклоне квадрокоптера в ту или иную сторону, картинка на экране повторяла наклоны, но не вращалась!!! Если помимо наклона, происходит вращение, то продолжайте подбирать настройку дальше, пока движения не будут точно совпадать.
О продукте
Беспилотник Xplorer Mini отличается высоким качеством. Конструкция отличается прочностью и отсутствием скрипучих пластиковых элементов. Для того чтобы сломать дрон, придется приложить немало усилий. Лучи складываются без всяческих затруднений, ход тугой и во время пилотирования фиксация характеризуется небольшим щелчком.
Обращает на себя внимание оформление беспилотника. Наиболее привлекательным элементом является панель, закрывающая аккумулятор. Она выделяется желтым структурным рисунком. И если цвет панели наскучит и захочется ее поменять, производитель предоставляет такую возможность.

В 2021 году оформление XIRO Xplorer Mini стало лучшим, за что разработчик получил премию Red Dot Design Award 2021. Она выдается в немецком городе Эссен институтом дизайна.
Первая авария
Слишком большая дифференциальная составляющая на практике приводит к автоколебаниям, чего не должно быть в теории. Почему? Уберём все составляющие, кроме дифференциальной, и решим уравнение:
превращается в линейную комбинацию
и её производной. То же самое происходит с моментом сил, который также является гармонической функцией в этом примере. При определенных
коэффициенты линейной комбинации могут быть такими, что возникнут незатухающие автоколебания.
Также результат работы составляющих ПИД приходится ограничивать по модулю. Иначе значение
Компромиссом является установка не слишком маленьких коэффициентов в совокупности с введением ограничения сверху на все три составляющие: пропорциональную, интегральную и дифференциальную.
Стоит сказать, что реальная коррекция в почти горизонтальном положении — около 1–2 попугаев процентов мощности моторов (полётная мощность около 60%).
Рассмотрим решение уравнения второго порядка (1), которое в одном из случаев является затухающей синусоидой.
На практике действительно получается что-то похожее (пример справа). Для демонстрации коэффициенты специально ухудшены для увеличения времени затухания. Оригинальную прошивку ESC пришлось заменить, т. она вносила существенную задержку, из-за которой математическая модель плохо описывала реальную систему.
Подключение fpv системы квадрокоптера.
Во-первых, удостоверьтесь в том, что питание в 14,0-16,8 вольт (4-х баночный аккумулятор) подходит для вашей камеры и видеопередатчика.
Во-вторых, нужно спаять перемычку между контактом RAM на плате и контактом VCC (см. 2 на схеме подключения электроники). Таким образом, мы подадим напряжение аккумулятора на все контакты, обозначенные символами RAM на плате контроллера.
Если же вам понадобиться напряжение 5 вольт на контактах RAM, то их нужно спаять каплей олова с контактом 5V. Вот как выглядит перемычка.